Welcome!
|
Hi guys, welcome to my website, looks like we have a common topic of interest! Here, i would like to take you through my little knowledge in the vast field of robotics.
Little have i learned, but here i am to share it, let's learn together. |
About me |

|
I'm a robotics enthusiast and a masters student at TU Delft, Netherlands (Biorobotics specialization), interested to create bionic systems that mimic the motion patterns of birds, fishes and animals. My interests include soft robotics, bio-mimetic robot design, mechanism design, robot dynamics, control systems, computer vision, pneumatics etc.
I love to design and build robots, some makes me happy, while some makes me sleepless. But definitely, i love them both, as both keeps me motivated. Here are some of them, that i loved building and hated disassembling. Yes, some of them were restructured and reborn with component transplants. But their spirit survives, for anyone who believes in their rebirth. Yes, they are well documented for anyone who wish to learn! I like to learn to apply, and when i apply, i wants to see it work. That's how i learn to make things work and that's how i like to work. Go through my works and feel free to ping me with your feedback, suggestions or questions. |
My robotics projects





Publications
INTERNATIONAL CONFERENCE PAPERS
|
Parameter Optimization and Experimentation of the Undulating fin of a Knife Fish Robot
Conference name: International Conference on Advances in Robotics 2015, Goa, India, July 2-4 DOI: 10.1145/2783449.2783459 Authors: Ajith A M, Sourabh Moitra, Dr. Sudheer A P Abstract: The rising demand for an energy efficient and eco-friendly mode of underwater propulsion has led to the development of bio-mimetic robots that adopt the swimming modes of real fishes. This paper deals with the parameter optimization of the bio-mimetic fin of a knife fish robot. The optimization is done to enhance the capability of the robot to generate wide range of undulations. A knife fish robot was fabricated and tested in a pool for different types of waves. The response of each wave on the swimming performance of the robot was studied to obtain the maximum thrust generating wave. |
Design, Fabrication and Analysis of a bio-inspired Tuna Fish Robot
Conference name: International Conference on Advances in Robotics 2015, Goa, India, July 2-4 DOI: 10.1145/2783449.2783503 Authors: Ajith A M, Sachin K S, Dr. Sudheer A P Abstract: The dangers offered by the contemporary underwater propulsion system based on rotary thrusters on the marine ecosystem has expedited the research in the field of underwater robotics to find an eco-friendly alternative for underwater locomotion. The turbulence, noise and cavitation effects causes by the heavy impellers pose serious threats to the aquatic organisms, sometimes even killing them. A bio-inspired tuna fish robot was designed, fabricated and analysed so that it replicates the real fish, both in shape and body movements used for locomotion. Special attention was given to impart a streamlined body for the fish robot for the minimization of the drag force while swimming. The robot was tested in the pool for forward propulsion, turning motion and depth control. Different body wave equations were used and the robot was found to swim along with the real fishes without driving them off. This eco-friendly behavior of the robot makes it suitable for underwater researches. |
INTERNATIONAL JOURNALS
|
Mathematical Modelling and Feasibility Study of the Bio-mimetic Undulating Fin of a Knife fish Robot
Journal name: Journal of Automation Mobile Robotics and Intelligent Systems (JAMRIS), 2016, Vol.10, No.1, pg.17-25. DOI: 10.14313/JAMRIS_1-2016/3 Authors: Ajith A M, Dr. Sudheer A P Abstract: Bio-mimetic underwater robotics is an emerging area of research, which has the potential to substitute the conventional energy inefficient mode of underwater propulsion using thrusters. In this paper, the mathematical modelling of the undulating fin is done and the effect of various parameters of the mechanism design on the available workspace is studied. The mathematical beauty is revealed, for the curves representing the mechanical constraint and the family of undulating waves. The feasibility of a wave to be generated by the mechanism was analyzed. |
Design Optimization of the Bio-mimetic Undulating Fin of a Knife Fish Robot
Journal name: Journal of Automation Mobile Robotics and Intelligent Systems (JAMRIS) 2016, Vol.10, No.1, pg.26-33 DOI: 10.14313/JAMRIS_1-2016/4 Authors: Ajith A M, Dr. Sudheer A P Abstract: Median Paired Fin Propulsion used by fishes like knife fish, has the potential to replace current energy inefficient underwater propulsion systems. This paper quantizes the efficiency of a fin mechanism based on its ability to incorporate a large number of undulations. Characteristic ellipses of a mechanism were defined, based on which two algorithms were defined to measure the capabilities of the mechanism. The available workspace of the mechanism was optimized to accommodate the undulation requirements of the robot based on the formulations. Further, the distortion effect on the waveform was identified and the optimization was redefined to obviate its possibility while in operation. |
Project Videos
|
Bio-mimetic Knife fish Robot and Bio-inspired Tuna fish Robot
|
Image processing projects
|
|
Wall Climbing Robot (basic prototype)
|
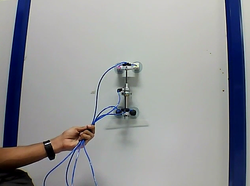
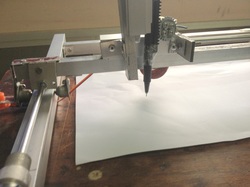
Vacuum Gripper and Pneumatic Image plotter
|
|
Soft Robotics Actuator based Propulsion system design
|
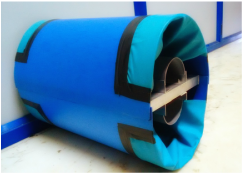
Bio-inspired underwater robot using Ring PAMs
|
Robotics Challenges


|
Automatic Robot of Robocon 2014
|
Manual robot of Robocon 2014
|
