|
What it does ?
The ball following robot searches around it for a ball of specific colour. If the ball is detected, it moves towards the ball whichever location it is placed or how fast the ball is changing its location. If no ball is found it goes on moving around to find it making it a fully autonomous robot. Working Platforms: Real-time Image processing is done by using OpenCV incorporated with Python 2.7.3 in Linux Platform. It processes the input video stream from the webcam through various Image Processing techniques and algorithms. The pyserial package establishes effective serial communication between Python and Arduino. Arduino takes up the control of the two motors required to move with the help of a motor driver named L293D. Working Algorithm: The input for real-time Image Processing is streamed by a webcam on the robot and is sent to the Python. Through various image processing algorithms and techniques for colour detection, hough circle detection, thresholding, smoothening and filtering, the location of the ball is determined. Python processes the results and decides on which direction the robot should move in order to reach the ball. Through Serial communication, Python commands the Arduino board to make the robot move in that direction. With the help of a motor driver named L293D, Arduino makes the robot move as per the algorithm of the programme. Applications:
Project Members: Project Guide: Sudheer A P, Asst Professor, NIT Calicut Project members: Ajith A M Project duration: May-June 2012 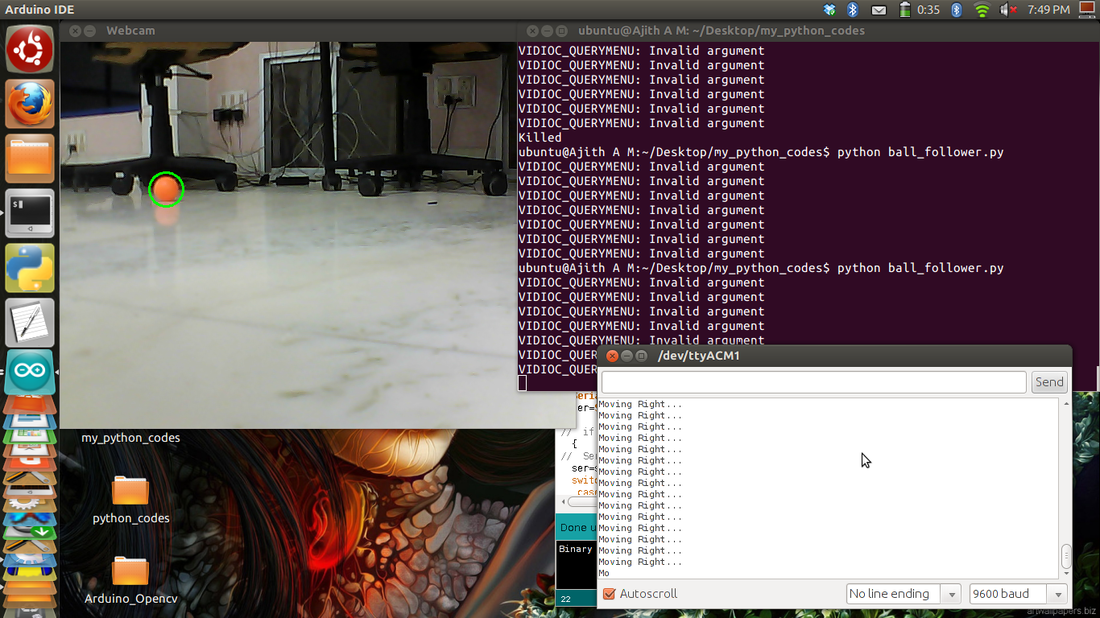
Live feed from webcam mounted on the robot
|
