|
Introduction:
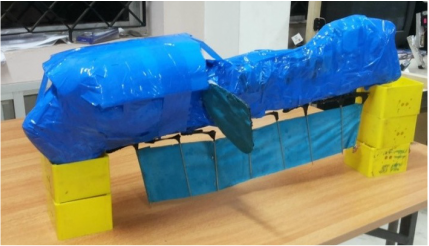
The mechanically inefficient thrust characteristics of a thruster based underwater propulsion system have opened up a new challenge to explore deeper into the propulsion system used by fishes. The two major modes of propulsion systems adopted by fishes for maneuvering are MPF (Median Paired Fin Propulsion) based and BCF (Body Caudal Fin Propulsion) based Propulsions. Future underwater vehicles are expected to adopt these biomimetic propulsion systems for maneuvering underwater due to its high swimming efficiency, ecofriendly nature, least drag coefficient due to streamlined body shape etc. The Knife fish fish robot is an underwater robot meant to mimic the Knife Fish and is first of its kind made in India. It mimics the Median Paired Fin (MPF) mode of Propulsion system adopted by fishes like Black ghost knife fish, to propel itself under water. A constant amplitude sinusoidal wave pattern is created on the bio-mimetic fin which is made of 0.5mm thick flexible rubber membrane. The fin is actuated with the help of 8 waterproof servo motors that is programmed to follow a motion pattern so that the resulting pattern on the fin is a sinusoidal pattern of desired amplitude and phase difference. Two pectoral fins driven by servo motors are mounted on two sides of the robot; it is used for the direction control/sideways motion of the robot by varying the frequency of operation of the pectoral fins to move either to the right or to the left. The depth control of the robot is implemented through the use of ballast tanks to vary the internal buoyancy of the robot at front and back ends of the robot. The experimentation on the robot proved that the robot performs optimally for a wave of a particular phase difference. The robot swam along with the real fishes in the pool, without disturbing them, proving its ecofriendly nature.
Electronics:
The robot is completely wireless and uses RF communication to take inputs from the Joystick. The Arduino Mega is used as the micro-controller to control the servo motors and the joystick controls. The motors are powered by using a Lithium polymer battery and is kept along with other electronics components at the head portion of the robot, properly waterproofed using silicon gel and NeverWet. Waterproofing have been a major challenge in the experimentation of the robot. Research: Based on the parameter optimization and mathematical modelling of the fin mechanism, i have developed two algorithms to compute two novel efficiency terms that denote the capability of the fin mechanism to accommodate a large number of waves for operation. These methodologies along with the empirical results from the experimentation was elucidated in three research papers that i wrote. Applications:
Team Members: Project Guide: Sudheer A.P, Asst. Professor, NIT Calicut Team Members: Ajith A M, Sachin K S, Sourabh Moitra. Project duration: May-July 2014. |

|
|
