|
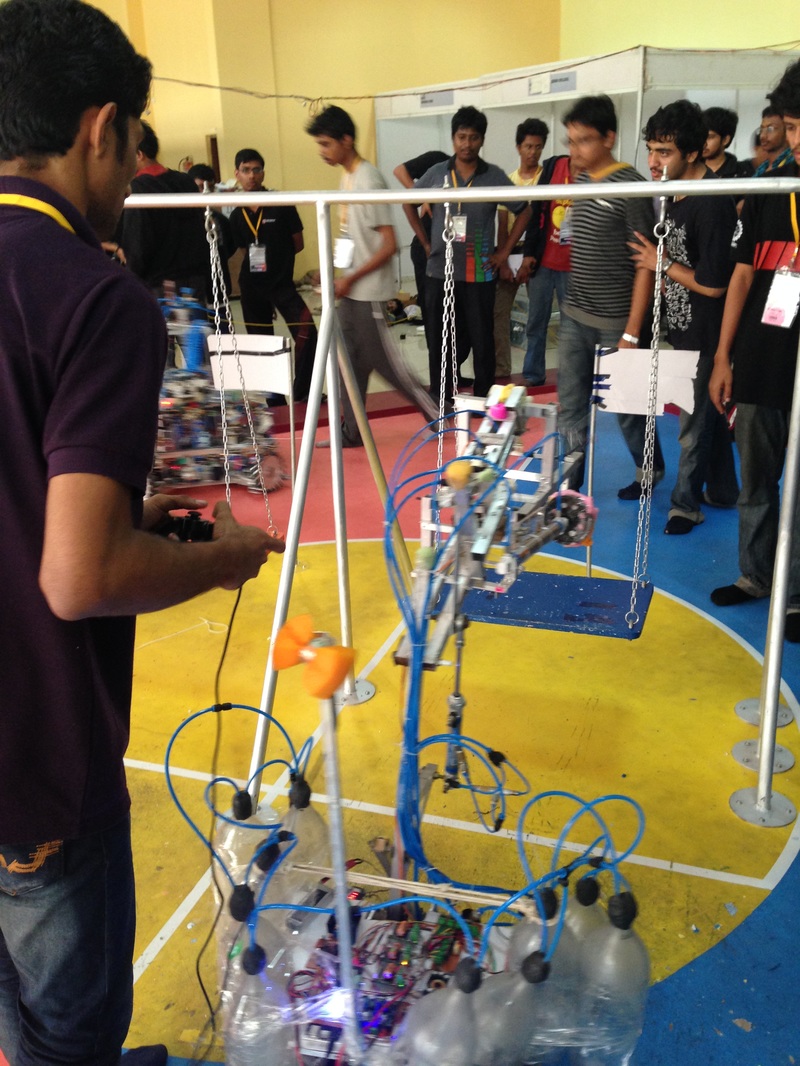
The challenge was to build a parent robot which is manually controlled and a child robot which operates automatically, and to synchronize both of their operations in complete coordination, to break the game challenge.
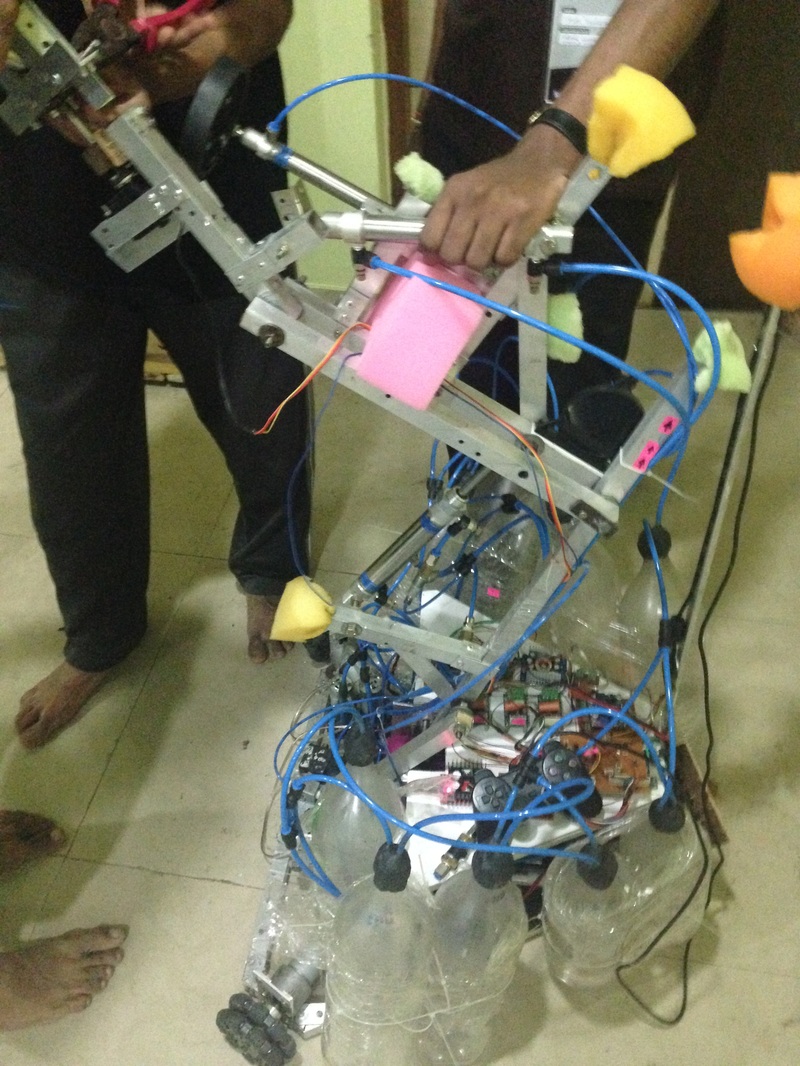
A 5-DOF, pneumatically actuated manipulator arm was designed, simulated and fabricated. The arm was mounted on a triangular base with an omni-wheel drive. The drive and the actuators of the manipulator was controlled by a Joystick. The arm was supposed to transport a child robot of mass 5 kg and to do specific tasks in the arena. The NIT Calicut team continued to be the only team from Kerala, participating in the competition.

|