|
Introduction: Design, analysis and fabrication of a bio-inspired underwater propulsion robot incorporating the effectiveness of squid and efficiency of salp and jellyfish, entailing the application of a series of artificial pneumatic muscle and associated control systems. An alternative to the conventional propeller driven marine systems, namely jet propulsion is introduced, inspired from the natural bionic jet propulsion adopted by squid, salp and jellyfish for underwater locomotion. Research: The mechanical design, mathematical modelling and experimentation of a soft robotic actuator was performed. Structural analysis using ANSYS Workbench, the thrust estimation of the propulsion system using aerodynamic airfoil modelling, the fuzzy logic implementation for the depth control mechanism using Matlab, control system design of the sideways motion using pectoral fins etc. were researched in depth. The paper works and patent applications are under process. 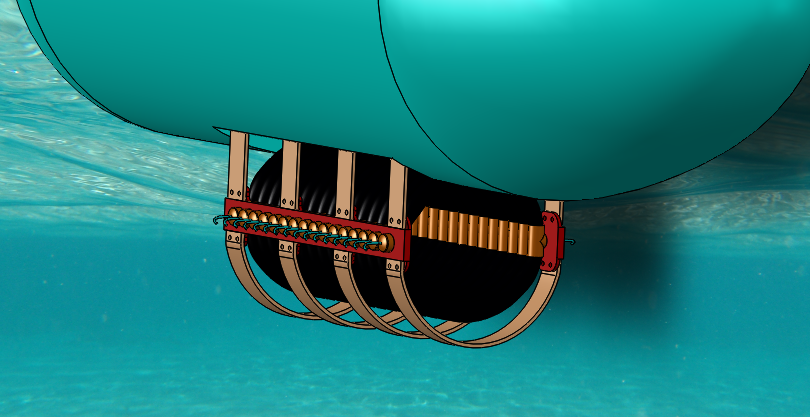
CAD Model of the Propulsion system
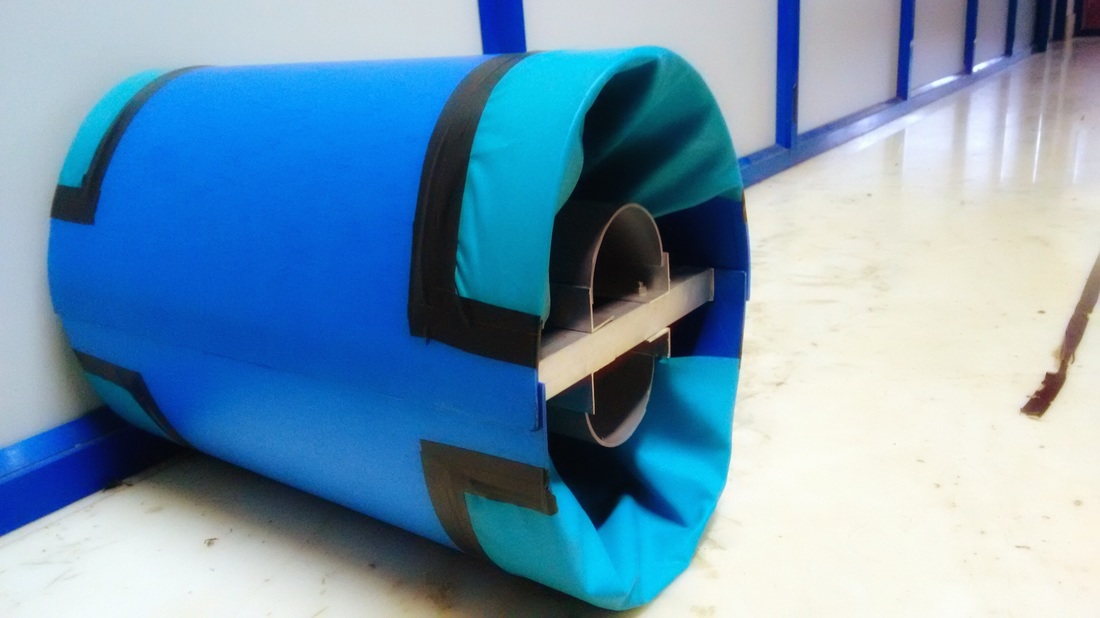
Fabricated robot
Team Members: Project Guide: Sudheer A P, Asst Professor, NIT Calicut. Project duration: July 2014 to April 2015. Team members: Ajith A M Hari Prasanth Jofred Joseph Ashwin George Basil George |
