|
Technology:
Image Processing done in OpenCV with Python in Ubuntu Platform and is completely Open Source. Implementation: Making use of real time image processing technique the robot is made capable to recognize gestures given to it. The details about the gesture are abstracted and various calculations are done on the input image to find out the exact parameters related to the feature that describes the gesture. Once the gesture is identified the robot takes decision on where to move as per the code. As a result the robot can be made completely controlled by gesture inputs through a virtual steering placed in front of the camera. Gesture recognition is done with the help of various techniques like image conversions, noise reduction through Gaussian blurring, dilation, eroding, thresholding, colour detection, stacking, Canny filtering etc. The protractor in the hands of the operator acts as the steering for the robot. Features:
Applications:
Team members: Project Guide: Sudheer A P, Asst Professor, NIT Calicut Project Members: Ajith A M Project duration: May-June 2012 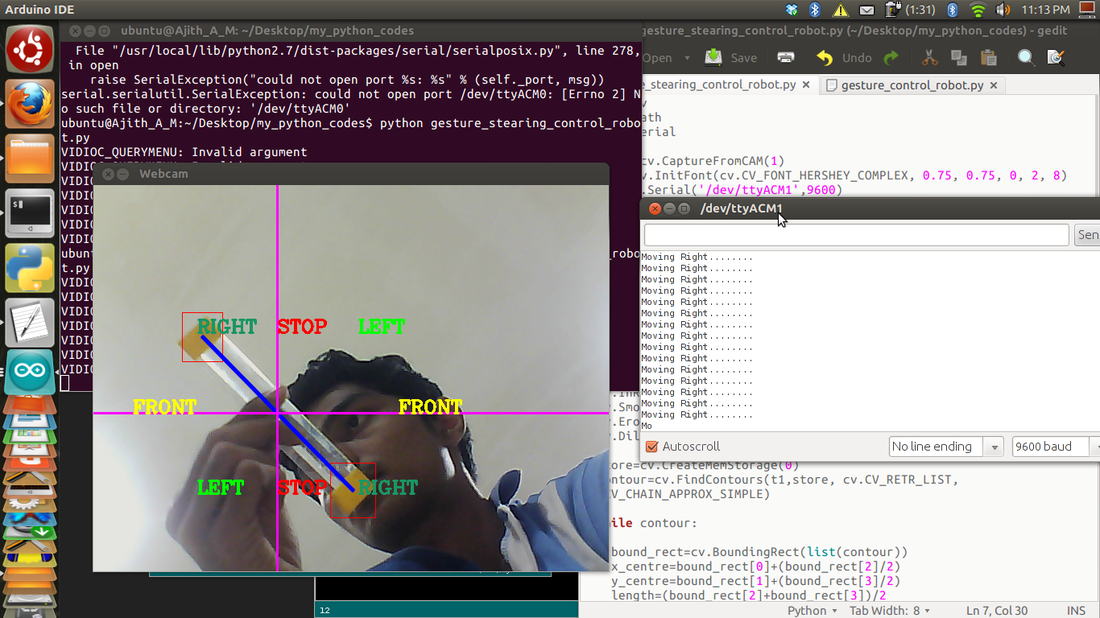
Live control of the robot
|
